Building My Own GPS Stratum-1 Time Server on a Raspberry Pi
Time silently hums away in the background, affecting everything we do today. Wake up, go to work, go to an appointment; all happen at specific times. Computers are no different, constantly logging time in logs, showing time in applications, and used for scheduling. In general, no one really cares about time because it's typically "accurate enough" for most tasks. Most computers just automatically have the correct time and are accurate down to a second or so, with most people perfectly content that it's technically approximately right. That being said, I'm neurotic and want nuclear-science-lab accuracy, knowing precisely what time it is.
While pool.ntp.org is a fantastic source of time, why settle when you can have sub-microsecond precision? No one is going to have a good time when you're technically having a bad time.
For this project, I wanted to see how precise time can be in my house, owning it end to end — no leaning on someone else's server out on the internet. In the industry, precision time is provided by what are called stratum-1 time servers and can sometimes be thousands of dollars. Given I'm cheap and don't have a money tree, I decided to build my own stratum-1 time server in a relatively affordable way: a Raspberry Pi that pulls time straight off the GPS satellites overhead and serves it to everything on my LAN, no internet required.
Along the way the project grew a second half, which is to visualize the satellite tracking and time sync. Once I had gpsd and chrony working, I wrote a small daemon that enables a live view of the calculated time, full gpsd + chrony stats, a satellite sky view, and an interactive 3D globe showing the GNSS constellation in space.
This build stands on the shoulders of the classic jacobdeane.com GPS time server guide, with two deliberate modernizations:
- chrony instead of
ntpd. chrony has native PPS support and a clean socket backend, so you skip the from-source NTP compile entirely. - Current Raspberry Pi OS paths. On Bookworm (and Trixie) the boot config lives at
/boot/firmware/config.txt, not the old/boot/config.txt(which is now just a placeholder).
How it all fits together
Before wiring anything up, here's a quick overview :
GPS/RTC HAT (u-blox + PPS) Raspberry Pi 3 / 4 (host)
┌───────────────────────────┐ ┌──────────────────────────────────────────────┐
│ receiver │ │ │
│ • NMEA over UART ──────┼──▶│ /dev/serial0 ─▶ gpsd ─┐ │
│ • PPS on GPIO18 ──────┼──▶│ /dev/pps0 ────────────┼─▶ chrony (stratum 1) │
└───────────────────────────┘ │ │ │ serves NTP │
│ gpsd JSON :2947 ─┐ │ ▼ to LAN │
│ chronyc -c ──────┼────┴─▶ Rust daemon │
│ (optional) NAVCEN ───▶ :8080 (configurable) │
│ ├─▶ /data (SSE telemetry)│
│ ├─▶ /satinfo (opt. sat info)│
│ └─▶ / (dashboard) │
└───────────────────────────────┬───────────────┘
│
browser ◀────┘ dashboard
- The timekeeping path — gpsd reads NMEA + PPS and feeds chrony; chrony disciplines the kernel clock and serves NTP to my network. This is what makes it a stratum-1 server. If you stop reading after Part 6, you've got a fully working time server.
- The telemetry path — a small daemon written in Rust that reads the same gpsd data plus chrony's stats and streams them to the dashboard over Server-Sent Events. It's strictly read-only and has zero effect on timekeeping accuracy.
What you'll need
Here's the parts list I used:
| Part | Notes |
|---|---|
| Raspberry Pi 3 or 4 | Both work identically here. The Pi 4 has dedicated Gigabit Ethernet; on the Pi 3, Ethernet shares the USB bus, so keep other USB devices off it. The Pi 5 needs different UART steps and isn't covered. |
| GPS HAT with PPS | I used the Uputronics Raspberry Pi GPS/RTC Expansion Board, and it's what this guide is written against. PPS is mandatory for stratum-1; NMEA alone is only good to a few hundred milliseconds. |
| GPS antenna (active, timing-grade) | Amphenol PCTEL 3978D-HR-DH-W — the exact antenna I used: a weatherproof (IP67) GPS L1 dome antenna with a built-in LNA + filter (~40 dB gain) and a TNC-female connector. A real step up from a puck. Needs a clear-ish view of the sky. |
| Antenna mounting bracket | Amphenol PCTEL MMK1925 — the stainless-steel L-bracket for the WS397x-series dome (fits the 3978D). This and the antenna above are what I actually mounted. |
| Antenna coax | A run with the right ends for your antenna and HAT (see the note below). I didn't spring for timing-grade coax — I used a cheap SMA extension cable like this one and it's been perfectly fine. |
All in all, the project cost ~$240 (inc. shipping, tax, etc). I didn't include the cost of a raspberry pi since I had one unused from a prior project, but assuming you bought a new Pi; you are ~$360.
Notes before we get started
Check your HAT's PPS pin. This guide assumes GPIO18 (the Uputronics default). Some HATs (e.g. Adafruit) use GPIO4. Adjust the gpiopin= value accordingly. Guess wrong and PPS will simply never show up.
Antenna connector & bias (if you're using the dome antenna above). The 3978D outputs TNC female, while most GPS HATs (Uputronics included) use SMA — so plan a coax run with the right ends (TNC-male at the antenna, SMA-male at the HAT) or grab an adapter. It's an active antenna (built-in LNA), so the HAT has to supply DC bias voltage on the coax; the Uputronics HATs do this, but confirm yours does. Being IP67 and bracket-mounted, it's meant to live outdoors on a mast with a clear sky view.
You don't have to mount it outdoors. The 3978D is a weatherproof, IP67, mast-mount dome. It's built to bolt onto a roof and shrug off the weather. I didn't put it on a roof. I bolted it to its MMK1925 bracket, set the whole thing up in my attic under asphalt shingles and 5/8" OSB, and ran it back to the HAT with a cheap SMA extension cable instead of proper timing-grade coax. On paper that's leaving signal on the table three different ways. In practice it's been tracking ~16-20 satellites and holding a sub-microsecond lock the entire time. So: buy the better antenna over fancy cable if you are on a limited budget and don't let "needs a clear view of the sky" scare you into a rooftop install (especially if you are HOA bound and limited to what you can mount outside). An attic on the sky-facing side of the house is likely going to do it for you.
Part 1 — The base OS
Flash Raspberry Pi OS Lite (64-bit) with Raspberry Pi Imager. In the Imager's advanced settings (the gear icon), enable SSH and set the hostname (I'll use timeserver for this guide) and locale before writing. Note: this Pi runs headless, which means you don't have a monitor connected to it, so you want to be able to reach it on first boot.
A word on Bookworm vs Trixie. As of mid-2026 there are active reports of a Trixie serial regression where the GPIO UART stops receiving GPS data on hardware that worked fine on Bookworm (a suspected kernel/PL011 driver issue). For a device whose entire job is reliable time, Bookworm might be the safer choice today; but so far things have worked fine for me. The config paths and overlays are identical — but if NMEA never appears despite correct wiring, jump to the Trixie diagnostic in Troubleshooting. There's also a Debian 12 vs 13 appendix at the bottom.
Boot, SSH to the Pi, and update first:
sudo apt update && sudo apt full-upgrade -y
sudo reboot
Part 2 — Freeing up the hardware UART
Here's the first "gotcha" the Pi throws at you. The Pi 3/4 wire the good UART (PL011) to the onboard Bluetooth by default. We need that UART for the GPS, and we also need to stop Linux from using the serial port as a login console.
2a. Disable the serial login shell (but keep the hardware port)
sudo raspi-config
Under Interface Options → Serial Port:
- login shell accessible over serial? → No
- serial port hardware enabled? → Yes
Choose Finish but don't reboot yet, we've got more config to add, and I'd rather reboot once.
2b. Disable Bluetooth to reclaim the UART
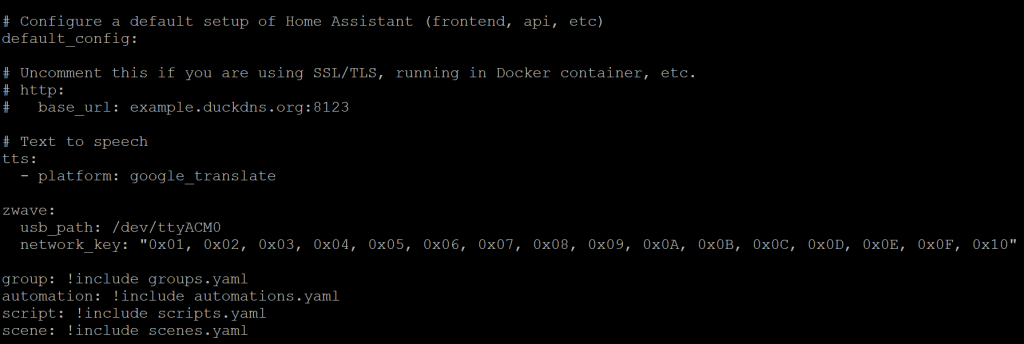
sudo vi /boot/firmware/config.txt
New to
vi? Here's the reader's digest: pressito start typing (insert mode), make your edits, then hitEscand type:wqfollowed by Enter to write and quit. If you fat-finger something and want to bail without saving,Escthen:q!throws your changes away. That's genuinely 90% of what you need to survivevi.
Add this at the end (we'll drop the PPS line in here too in Part 3, so it's a single reboot):
# Reclaim the PL011 UART for GPS by disabling onboard Bluetooth
enable_uart=1
dtoverlay=disable-btOlder guides use
dtoverlay=pi3-disable-bt; the current canonical name is justdisable-bt.raspi-configmay have already added anenable_uart=1line — a duplicate is harmless, but you can keep just one if it bugs you.
Then stop the Bluetooth-UART service:
sudo systemctl disable hciuart
On a Lite image (and commonly on Trixie) this may report
Unit hciuart.service does not exist— and that's totally fine. It ships with thepi-bluetoothpackage, which isn't always installed, anddisable-btalready turns Bluetooth off at the device-tree level. The overlay is what actually matters here; this step is just belt-and-suspenders.
Part 3 — Enabling PPS
PPS (pulse-per-second) is the secret sauce. NMEA sentences tell you what second it is; the PPS pulse tells you exactly when that second begins, down to the nanosecond. No PPS, no real stratum-1.
3a. Load the PPS-over-GPIO overlay
Still in /boot/firmware/config.txt, add (adjust gpiopin for your HAT):
# Pulse-Per-Second input on GPIO18
dtoverlay=pps-gpio,gpiopin=18Then load the kernel module at boot and reboot so both the UART and PPS changes take effect:
echo 'pps-gpio' | sudo tee -a /etc/modules
sudo reboot3b. Verify raw GPS and PPS
First confirm the UART is on the GPIO header, then read raw NMEA:
ls -l /dev/serial0 # expect: /dev/serial0 -> ttyAMA0
sudo cat /dev/serial0Always use /dev/serial0 — it's a symlink that always points to whichever UART is on the GPIO header, so you don't have to care whether it's ttyAMA0 or ttyS0 today. Ctrl-C to stop.
If you see garbled characters instead of clean $GNRMC/$GNGGA lines, don't panic, that's a baud-rate mismatch, not a fault. Bytes are flowing; the port's just reading them at the wrong speed. Set the rate explicitly and re-read until it's clean:
sudo stty -F /dev/serial0 9600 raw && sudo cat /dev/serial0 # common u-blox default
sudo stty -F /dev/serial0 38400 raw && sudo cat /dev/serial0
sudo stty -F /dev/serial0 115200 raw && sudo cat /dev/serial0 # mine with the Uputronics unitWrite down the rate that produces readable NMEA, you'll need it for gpsd in Part 4. It's a property of your GPS module, not the OS. Many u-blox modules use 9600, but others (including some Uputronics units) run at 115200. Mine was 115200.
Now confirm the pulse itself. This needs a satellite fix; most HATs blink a timepulse LED once they've locked:
sudo apt install -y pps-tools
sudo ppstest /dev/pps0You want a new assert line every second, timestamped right on the whole second:
source 0 - assert 1699999590.000001416, sequence: 197334 - clear ...
source 0 - assert 1699999591.000000698, sequence: 197335 - clear ...No output usually just means no fix yet, wait a couple mins or try moving the antenna to a different location. If you are running the antenna in a faraday cage, expect no results since it won't find a satellite.
Part 4 — gpsd
sudo apt install -y gpsd gpsd-clients
sudo vi /etc/default/gpsdPoint it at your HAT (using the baud rate you found in Part 3b):
START_DAEMON="true"
USBAUTO="false"
DEVICES="/dev/serial0 /dev/pps0"
GPSD_OPTIONS="-n -s 115200"-n polls the GPS immediately at boot; -s 115200 pins the serial speed so gpsd doesn't autobaud its way into garbage. Enable and check:
sudo systemctl enable --now gpsd
sudo systemctl restart gpsd # ensure it picks up the new config
gpsmon # or: cgps -s
gpsmon shows the raw feed (fast-scrolling UBX packets are normal and healthy); cgps -s gives a calmer table. You want a 3D fix, satellites with good SNR, low DOP values, and a PPS line with a near-zero offset. That PPS line is the confirmation I was chasing.
Tip: gpsd takes exclusive control of the port. If you want to
cat /dev/serial0again for debugging, stop gpsd first:sudo systemctl stop gpsd gpsd.socket.
Part 5 — chrony with the socket backend
sudo apt install -y chronyHere's the key design point, and the reason chrony is such an upgrade over the old ntpd dance: gpsd hands the precise PPS timestamp to chrony through a Unix socket (chrony's SOCK refclock). gpsd automatically writes to /run/chrony.<device>.sock once chrony has created it — neatly sidestepping the classic headache where chrony drops privileges and can no longer read /dev/pps0 directly.
sudo vi /etc/chrony/chrony.confAdd this at the end:
# --- GPS + PPS reference clocks -------------------------------------------
# Coarse absolute time from gpsd (NMEA) via shared memory.
# 'noselect' = never sets the clock, only gives the PPS pulse a whole-second
# label. Tune 'offset' after calibration (Part 7d) if PPS won't lock.
refclock SHM 0 refid GPS precision 1e-1 offset 0.0 delay 0.2 noselect
# Precise PPS via gpsd's socket. gpsd writes here automatically.
# 'lock GPS' anchors each pulse to the GPS second above.
refclock SOCK /run/chrony.pps0.sock refid PPS lock GPS prefer
# Serve time to your LAN (adjust to your subnet) and keep serving during
# brief GPS dropouts.
allow 192.168.0.0/24
local stratum 1
# Optional internet fallback if the antenna fails. Remove for air-gapped use.
pool 2.debian.pool.ntp.org iburstRestart both, in order — chrony first, so its socket exists by the time gpsd starts:
sudo systemctl restart chrony
sudo systemctl restart gpsdConfirm the socket exists (it should be owned by root and actually be a socket — note the leading s in the permissions):
ls -l /run/chrony.*.sock # expect /run/chrony.pps0.sockPart 6 — Confirming you've actually got a stratum-1 server
Give it 5 minutes to settle, then watch the sources roll in:
watch -n 2 chronyc sources -vYou're looking for #* next to PPS. The asterisk means it's the selected source disciplining the clock. It starts at #? (not enough samples yet), climbs its reachability register (0 → 1 → 3 → 7 → 17 → 37 → 77 → 377), then finally promotes to #*. The internet servers drop to ^- (background sanity checks) once PPS takes over. Watching that register tick up is weirdly satisfying:
MS Name/IP address Stratum Poll Reach LastRx Last sample
=========================================================================
#? GPS 0 4 377 14 +42ms[ +42ms] +/- 200ms
#* PPS 0 4 377 13 -242ns[ -324ns] +/- 1095ns
^- 2.debian.pool.ntp.org 2 6 77 45 -437us[ -436us] +/- 13msThen confirm the server itself:
chronyc trackingLook for Stratum : 1, Reference ID … (PPS), and a System time offset down in the sub-microsecond range. That, right there, is a working stratum-1 time server. I may have taken a screenshot.
Reading the numbers:
System time/Last offsetare your current accuracy (nanoseconds-to-microseconds once locked).RMS offsetlooks alarming at first (hundreds of µs) because it's a rolling average still dominated by the noisy warm-up; it falls steadily the longer it runs, so don't judge it too early.Root delaynear zero andReference ID= PPS confirm a direct hardware lock.
The falseticker trap. chrony will reject PPS if the GPS (NMEA) label is more than ±200 ms off the true second. If PPS stays stuck at
#?, that's almost always the culprit, calibrate the offset (Part 7d).
At this point the time server itself is done. Below is the fun part of visualizing the setup. If you just wanted accurate time, congratulations, you can stop here.
Part 7 — The telemetry daemon
Now to create a live dashboard to visualize everything. The daemon does four things:
- Connects to gpsd's JSON socket on
127.0.0.1:2947— the same protocollibgpsspeaks, so I get identical data without any C FFI. - Polls chrony once a second with
chronyc -c tracking(the-cflag hands back machine-readable CSV from chrony's command socket). - Merges both, streams them to the browser over SSE at
/data, and serves the dashboard. - (Optional, off by default) fetches and caches the NAVCEN GPS almanac and serves it at
/satinfofor satellite-health enrichment (more in Part 8).
Get the code, the daemon and dashboard live on GitHub: JackStromberg/gps-timeserver-daemon. Clone it directly onto the Pi:
sudo apt install -y git
git clone https://github.com/JackStromberg/gps-timeserver-daemon.git
cd gps-timeserver-daemon
ls -alYou should end up with:
gps-timeserver-daemon/
├── Cargo.toml
├── src/main.rs
└── static/index.html # already set to live mode (USE_SIMULATION = false)7a. Install Rust and build
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh # press Enter for defaults
source "$HOME/.cargo/env"
cargo --version # should print a version
sudo apt install -y build-essential # C linker (Lite images lack it)
cd gps-timeserver-daemon
cargo build --release
cargo: command not foundright after installing? The installer can't modify an already-running shell'sPATH. Runsource "$HOME/.cargo/env"(or just open a new terminal). Ifls ~/.cargo/bin/cargodoesn't exist, the install didn't finish — re-run thecurl … | shline.
error: linker 'cc' not found? Installbuild-essential(above) and rebuild.
Fair warning: the first build on a Pi is slow. It compiles tokio, axum, reqwest, and the whole rustls TLS stack from scratch (several minutes), and it may look completely frozen at the final link step. That's normal. Subsequent builds are incremental and quick.
7b. Run it
./target/release/gps-timeserver-daemonIt prints its listen address and stays running (it's serving, so it won't hand you back a prompt). Open http://<pi-ip>:8080 from a browser on your LAN and you should see the dashboard light up.
The port is configurable — see Part 8. If
8080is already taken (a Docker service, say), you'll getAddrInUse; set a differentPORTrather than editing code.
7c. The /data contract
The daemon emits one JSON object per second in this shape (the dashboard reads exactly these field names):
{
"timestamp": "2026-07-07T12:34:56Z",
"time": { "gps_time": "...", "system_time": "...", "offset_us": 0.42,
"time_since_last_fix": 0.3, "leap_seconds": 18 },
"gps": { "mode": 3, "satellites_visible": 12, "satellites_used": 9,
"hdop": 0.8, "vdop": 1.1, "pdop": 1.3, "gdop": 1.5, "tdop": 0.7,
"ept": 0.005, "latitude": 51.5, "longitude": -0.12, "altitude": 35.2,
"epx": 3.1, "epy": 4.2, "epv": 6.0, "track": 0.0, "speed": 0.0,
"climb": 0.0, "eps": 0.5 },
"chrony": { "reference_id": "PPS", "stratum": 1, "system_time": 0.0000004,
"last_offset": 0.0000004, "rms_offset": 0.0000012,
"frequency_ppm": -2.3, "residual_freq_ppm": 0.001, "skew_ppm": 0.02,
"root_delay": 0.00001, "root_dispersion": 0.00002,
"update_interval": 16.0, "leap_status": "Normal" },
"device": { "path": "/dev/serial0", "driver": "u-blox", "subtype": "...",
"bps": 115200, "parity": "N", "native": true, "cycle": 1.0, "mincycle": 1.0 },
"version":{ "release": "3.25", "proto_major": 3, "proto_minor": 15 },
"satellites": [
{ "prn": 5, "system": "GPS", "elevation": 70, "azimuth": 251, "snr": 42, "used": true }
]
}
Telemetry::to_json() in src/main.rs is the single source of truth for this contract — if you want to add a field, that's the one place to touch.
7d. Calibrating the GPS offset (optional)
If PPS refuses to lock, let it run ~15 minutes, then read the measured GPS offset:
chronyc sourcestatsTake the GPS source's Offset (say +512ms), convert to seconds, and set it as offset on the SHM 0 line in chrony.conf (e.g. offset 0.512). Restart chrony. This nudges the NMEA label back inside the ±200 ms window so PPS gets accepted — the fix for that falseticker trap I mentioned above.
Part 8 — Configuration via environment variables
I wanted to be able to change behavior without recompiling, so the daemon reads a handful of environment variables at startup. Set them when running manually, or via Environment= lines in the systemd unit (Part 9).
| Variable | Default | Purpose |
|---|---|---|
PORT | 8080 | Port to bind (binds 0.0.0.0:PORT). |
LISTEN_ADDR | (unset) | Full host:port; overrides PORT. Use 127.0.0.1:8088 to serve only locally, 0.0.0.0:8088 for the LAN. |
SATINFO_ENABLED | (off) | 1/true/yes/on enables the optional NAVCEN satellite-info fetcher. Off means the daemon makes zero outbound network calls — safe for air-gapped setups. |
SATINFO_INTERVAL_HOURS | 168 (weekly) | How often to refresh the NAVCEN data. The constellation changes only a few times a year, so weekly (or 720 ≈ monthly) is plenty. |
SATINFO_URL | NAVCEN YUMA almanac | Override the source if needed. |
The optional satellite-info fetcher
When SATINFO_ENABLED=1, a background task fetches the NAVCEN GPS almanac (US Coast Guard, public-domain US-government data), caches it in memory, and serves it at /satinfo. The dashboard uses it to add live health status to each GPS satellite's hover tooltip. On failure it retries in an hour; on success it waits the full interval. Left disabled (the default), /satinfo returns {"enabled": false} and the dashboard silently falls back to its built-in reference table — so nothing breaks either way.
Quick checks once you've enabled it:
journalctl -u timeserver-dashboard -n 20 --no-pager # look for: satinfo: fetched N satellites
curl -s localhost:8080/satinfo | head -c 300 # expect "enabled":true and a satellites objectOn data sources & licensing (not legal advice): NAVCEN is public-domain US-government data — no account, redistribution-safe. The dashboard's built-in reference table is assembled from public GPS records. If you instead point live mode at CelesTrak, respect their access etiquette (cache; don't poll more than roughly every 2 hours) and cite them. There's a fuller Licensing appendix at the bottom.
Part 9 — Running it at boot
I want this thing to just come back on its own after a power blip, so let's give it a systemd unit:
sudo vi /etc/systemd/system/timeserver-dashboard.service
[Unit]
Description=GPS Timeserver Dashboard
After=network-online.target gpsd.service chrony.service
Wants=network-online.target
[Service]
# Adjust User and paths to where you put the project.
User=pi
WorkingDirectory=/home/pi/gps-timeserver-daemon
ExecStart=/home/pi/gps-timeserver-daemon/target/release/gps-timeserver-daemon
Restart=on-failure
RestartSec=3
# Optional configuration (see Part 8):
Environment=PORT=8088
# Environment=SATINFO_ENABLED=1
# Environment=SATINFO_INTERVAL_HOURS=168
[Install]
WantedBy=multi-user.target
WorkingDirectorymatters more than it looks. The daemon servesstatic/index.htmlrelative to where it runs, and systemd does not inherit your shell's current directory. Point this at the wrong place and you'll get a 404 for the dashboard.
Enable and verify:
sudo systemctl daemon-reload
sudo systemctl enable --now timeserver-dashboard
systemctl status timeserver-dashboard # expect: active (running)
journalctl -u timeserver-dashboard -n 5 --no-pager # confirm the listen address
Whenever you edit the unit file (say, to change an
Environment=line), runsudo systemctl daemon-reloadand thensudo systemctl restart timeserver-dashboard. Skipping the reload is the classic "my change didn't take" gotcha.systemctl show timeserver-dashboard -p Environmentprints what systemd is actually passing, which is handy when you're sure you fixed it but it disagrees.
One nice quality-of-life note: editing only static/index.html (HTML/CSS/JS) needs no rebuild and no restart — the daemon serves it from disk at request time. Just hard-refresh the browser (Ctrl-Shift-R). Only changes to src/main.rs or Cargo.toml require cargo build --release.
Part 10 — Serving time to the rest of the network
Everything so far only disciplines the Pi's own clock. To let other machines sync from it, chrony has to answer NTP requests — and it refuses by default, which is a good safety default but not what we want here.
10a. Match the allow line to your LAN
hostname -I # your Pi's IP, e.g. 192.168.1.50
If the Pi is 192.168.1.50, your subnet is likely 192.168.1.0/24. Edit chrony.conf so the allow line matches — a whole subnet (allow 192.168.1.0/24), a single host (allow 192.168.1.100), or allow all only if you deliberately mean to serve the public — then restart:
sudo systemctl restart chrony
10b. Confirm it's serving
sudo ss -ulnp 'sport = :123' # something should be bound to UDP 123
chronyc clients # machines that have requested time (empty until clients connect)
If you run a firewall on the same Raspberry Pi (ufw, nftables, or Docker-managed iptables), open NTP: sudo ufw allow 123/udp. A plain Lite install has no firewall and needs nothing.
10c. Point your clients at the Pi
Your Pi is stratum 1, so anything syncing to it becomes stratum 2 — perfect for a LAN. Here's how I pointed a few common clients at it:
- Router: set its NTP server to the Pi's IP — this pushes time locally to every device automatically, using it as an ntp source.
- Linux: add
server <pi-ip> iburstto/etc/chrony/chrony.conf, restart chrony. - Windows:
w32tm /config /manualpeerlist:"<pi-ip>" /syncfromflags:manual /updatethenw32tm /resync. - macOS: System Settings → General → Date & Time, or
sudo sntp -sS <pi-ip>.
Verify from a client with chronyc -h <pi-ip> tracking, sntp <pi-ip>, or ntpdate -q <pi-ip>. Back on the Pi, chronyc clients will list everyone pulling time from you.
Part 11 — Actually using the dashboard
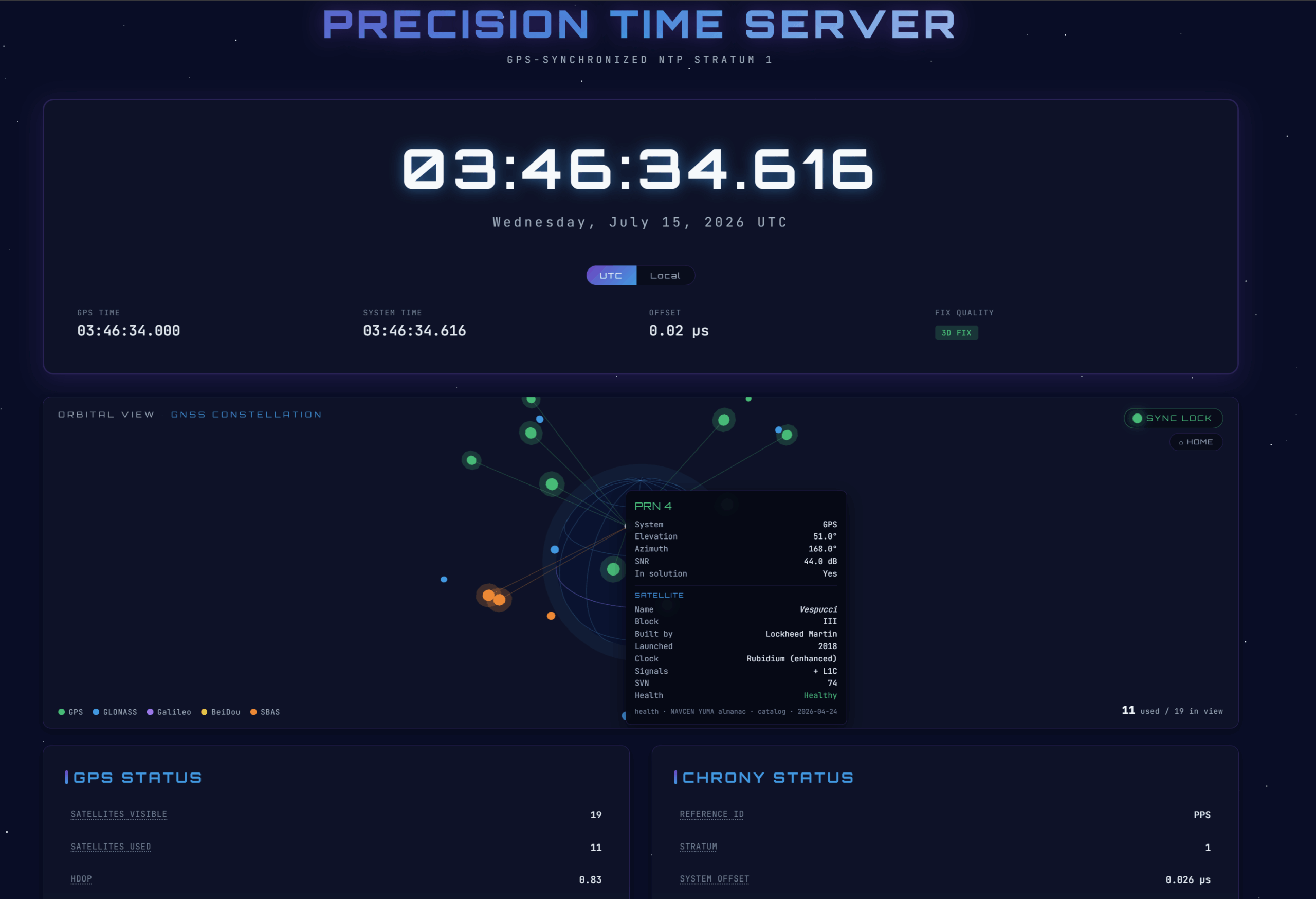
Open http://<pi-ip>:<port> (default 8080, or 8088 in my examples above). Everything updates once per second from the live feed.
Time header. A large clock with millisecond precision, plus GPS time, system time, and the chrony offset. The UTC / Local toggle under the clock switches every time on the page between UTC and your browser's local zone, and it remembers your choice across reloads.
Orbital globe (the hero panel, and my favorite). A holographic Earth with each GNSS satellite placed in true 3D from its azimuth/elevation, color-coded by constellation, with beams running from the satellites in use down to a marker at your location.
- Drag to rotate (mouse or touch): horizontal spins around the poles, vertical tilts.
- Home button (top-right) or double-click the globe to glide back to the default view.
- Hover a satellite for its details: PRN, constellation, elevation, azimuth, SNR, and whether it's in the solution — plus, for GPS, catalog facts (block, manufacturer, clock type, launch year, name, SVN) and, if
/satinfois enabled, live health. - Hover a legend entry (GPS/GLONASS/Galileo/BeiDou/SBAS) for a one-line explanation of that constellation.
Status panels. GPS Status, Chrony Status, Position & Navigation, and System Info. Hover any metric label (they've got a dotted underline) for an explanation of what it means and what a good value looks like — HDOP, TDOP, EPX/EPY/EPV, the chrony offsets, and so on. I added these mostly so I'd stop having to look them up myself.
Sky view + satellite table. Polar az/el plot, plus a detailed per-satellite table.
Satellite-info modes (dashboard side)
Near the top of the <script> in static/index.html:
SATINFO_MODE—'daemon'(default; asks this server's/satinfo, no CORS, falls back to the built-in table if the server has fetching disabled),'offline'(built-in table only, never fetches),'celestrak'(fetch CelesTrak directly from the browser; may hit CORS), or'off'.- The built-in table always supplies block/manufacturer/clock/name/launch;
/satinfoadds live health on top.
Previewing with simulated data
static/index.html ships with const USE_SIMULATION = false; (live). To preview the UI without any hardware — say you're building this on your laptop before the HAT arrives — open a copy with it set to true. It generates fake data (a fixed location, invented satellites, a locked stratum-1 state) so every visual works offline.
Heads up: the globe and all hover tooltips are mouse-based, so the hover interactions won't appear on touchscreens (dragging the globe still works via touch).
Part 12 — Optional: running the dashboard in Docker
You can containerize the dashboard daemon — but keep gpsd + chrony on the host. The kernel clock is a single host-wide resource; putting chrony in a container means granting it SYS_TIME and steering the host clock across the container boundary — extra layers wrapped around your most timing-sensitive component. The daemon, on the other hand, is a read-only consumer and containerizes cleanly with zero precision impact.
Here's an example multi-stage Dockerfile:
# Build
FROM rust:1-bookworm AS build
WORKDIR /app
COPY Cargo.toml Cargo.lock* ./
COPY src ./src
RUN cargo build --release
# Runtime
FROM debian:bookworm-slim
RUN apt-get update && apt-get install -y --no-install-recommends \
chrony ca-certificates && rm -rf /var/lib/apt/lists/*
WORKDIR /app
COPY --from=build /app/target/release/gps-timeserver-daemon /usr/local/bin/
COPY static ./static
CMD ["gps-timeserver-daemon"]
Note that chrony is installed here only for its chronyc client (the daemon shells out to it) — the container does not run a chrony daemon. Run it sharing the host network and chrony's command socket:
docker build -t timeserver-dashboard .
docker run -d --name timeserver-dashboard \
--network host \
-e PORT=8088 \
-e SATINFO_ENABLED=1 \
-v /run/chrony:/run/chrony:ro \
--restart unless-stopped \
timeserver-dashboard
--network hostlets the daemon reach host gpsd at127.0.0.1:2947and keepsPORT/LISTEN_ADDRworking normally.- Mounting
/run/chronygives the container'schronycaccess to chrony's command socket. - You do not need
--device=/dev/serial0or/dev/pps0here — the daemon never touches the hardware directly; it reads gpsd and chronyc. (Those devices only matter if you were containerizing gpsd/chrony too, which, again, I'd steer you away from.)
Troubleshooting
Here's a running list of things I've stumbled across:
| Symptom | Likely cause / fix |
|---|---|
cat /dev/serial0 shows nothing | UART not freed. Confirm dtoverlay=disable-bt is in /boot/firmware/config.txt (not /boot/), hciuart disabled, rebooted. Check ls -l /dev/serial0 points to ttyAMA0. |
cat /dev/serial0 shows garbled text | Baud-rate mismatch (not a fault). Set the rate with stty -F /dev/serial0 <rate> raw and re-read; use the working rate in gpsd's -s. |
| Silent serial on Trixie only, same HW worked on Bookworm | Suspected Trixie UART/PL011 regression. Diagnose: pinctrl poll 14-15 &, then trigger GPS data — if GPIO15 (RX) never changes level, no bytes are reaching the pin (a kernel issue, not your config). Try linux-modules-extra-raspi, pin an older kernel, or fall back to Bookworm. |
ppstest prints nothing | No fix yet, or wrong PPS pin. Give it sky view; verify gpiopin= (4 vs 18). |
chrony PPS stuck at #? | GPS/NMEA offset > 200 ms → falseticker. Calibrate the SHM 0 offset (Part 7d); make sure /dev/pps0 is in gpsd DEVICES and /run/chrony.pps0.sock exists. |
| Dashboard "Waiting for data..." | Daemon can't reach gpsd. Check systemctl status timeserver-dashboard and that gpsd is up on :2947. |
| Dashboard returns 404 | WorkingDirectory in the unit doesn't point at the project root, so static/index.html isn't found. Fix the path, daemon-reload, restart. |
Daemon exits with AddrInUse | The port's taken (e.g. Docker on 8080). Set Environment=PORT=8088 (or another free port); sudo ss -ltnp 'sport = :8080' shows the culprit. |
/satinfo shows enabled:false | SATINFO_ENABLED not set/true, or daemon-reload skipped after editing the unit. systemctl show … -p Environment to verify. |
/satinfo enabled:true but count:0 | NAVCEN fetch/parse failed (check the error field and the journal). Network blip → it retries within an hour; persistent → check outbound HTTPS. |
cargo: command not found | PATH not loaded: source "$HOME/.cargo/env". If ~/.cargo/bin/cargo is missing, re-run the rustup installer. |
cargo build → linker 'cc' not found | sudo apt install -y build-essential, then rebuild. |
| Clients can't sync | The allow subnet in chrony.conf has to match your LAN; open UDP/123 if you run a firewall. |
| Satellites look frozen on the globe | Expected! GPS is MEO (~2 orbits/day) and moves only gradually in az/el; the receiver also updates angles slowly. Check back in 20–30 min and the pattern will have shifted. |
What you end up with
So where does all this leave you? Two things:
- A stratum-1 NTP server disciplined by GPS + PPS, accurate to the microsecond or better, serving your whole LAN with no internet dependency. Every device on my network now sets its clock from a little box in my attic pulling time straight out of the sky, and I find that quietly delightful.
- A live dashboard showing the calculated time, full gpsd + chrony stats with hover explanations, an interactive 3D constellation globe with per-satellite detail, and a sky view — all fed by the same hardware over SSE, with a clean JSON contract you can extend however you like.
If you want to keep tinkering, there are really just two files worth revisiting: src/main.rs (where Telemetry::to_json() defines the data contract) and static/index.html (METRIC_HELP, GPS_SAT_DB, and the render functions). Everything I'd want to customize lives in one of those two places.
If you made it this far, congrats on your new clock! Your clock is now more accurate than it has any reason to be!
Appendix A — Debian 12 (Bookworm) vs Debian 13 (Trixie)
Both work; most steps are identical. I verified everything on Debian 12 & 13 exactly as written above.
| Topic | Debian 12 / Bookworm | Debian 13 / Trixie |
|---|---|---|
| Boot config path | /boot/firmware/config.txt | Same |
disable-bt / pps-gpio overlays | Same | Same |
| Serial device | /dev/serial0 → ttyAMA0 (always prefer serial0) | Same |
systemctl disable hciuart | Usually succeeds | Often Unit … does not exist — harmless |
| GPIO UART receiving GPS | Reliable | Regression risk (mid-2026): no RX bytes despite correct config. Diagnose with pinctrl poll 14-15; may need linux-modules-extra-raspi, an older kernel, or Bookworm |
| gpsd / chrony | Stock; config as written | Newer; same config syntax, chronyc -c tracking CSV unchanged |
| Recommendation | Preferred for a time server | Works, but verify the serial link early |
Remember: serial baud rate is a property of your GPS module, not the OS — it's handled identically on both.
Appendix B — Environment variables (quick reference)
Daemon (systemd Environment= or shell):
| Variable | Default | Notes |
|---|---|---|
PORT | 8080 | Bind port. |
LISTEN_ADDR | (unset) | Full host:port; overrides PORT. |
SATINFO_ENABLED | off | 1/true/yes/on to enable NAVCEN fetch. Off = no outbound calls. |
SATINFO_INTERVAL_HOURS | 168 | Refresh cadence (weekly). |
SATINFO_URL | NAVCEN YUMA | Source override. |
Dashboard (static/index.html constants):
| Constant | Default | Notes |
|---|---|---|
USE_SIMULATION | false | true = fake data for previewing. |
SATINFO_MODE | 'daemon' | daemon / offline / celestrak / off. |
Appendix C — Licensing & data sources
Not legal advice. For personal, non-commercial use you're clear on all of the below.
- GPS orbital/almanac data is US-government, public-domain. NAVCEN (US Coast Guard) serves it with no account and is redistribution-safe — the recommended live source here.
- CelesTrak (an alternative live source) redistributes the same government data and adds convenient PRN/block labeling. Respect their access etiquette: cache results and don't poll more than roughly once every two hours; cite CelesTrak; note that it isn't an official source. Commercial redistribution is a "contact them first" situation.
- The dashboard's built-in reference table is factual data (which PRN, block, launch year, manufacturer) assembled from public records; facts aren't copyrightable.
- For anything commercial or internet-facing at scale using, review each source's current terms directly.